
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 머신러닝
- 데보션
- murray 제어공학
- 백준
- 파이썬
- CS229
- Stanford
- 로보틱스
- ubuntu
- Mujoco
- 강화학습
- CNN
- notion
- mnist
- 블로그시작
- q 함수
- 인공지능
- Computer Vision
- 이분 탐색
- pytorch
- ROS
- 제어공학
- MDP
- 개발
- 제어
- 누구나 자료구조 알고리즘
- 피드백제어
- Today
- Total
기괴기계 (인공지능, ROS, 확률 통계 etc..)
Murray 제어공학 -1(피드백과 제어) 본문
제어공학 공부할 일이 생겨서 Murray의 제어공학을 공부하게 되었다.!
1.1 What is Feedback?
동적 시스템에서의 Feedback의 정의
Term feedback: 2개 혹은 그 이상의 동적 시스템이 서로에게 영향을 끼치거나 강하게 연결되어있는 경우의 상황을 의미함. first system이 second system에 영향을 끼치고 반대로 second system이 first system에 영향을 끼치는 과정에 대한 설명
(control system에서의 feedback과 동적시스템에서의 넓은 의미의 feedback의 차이가 존재)
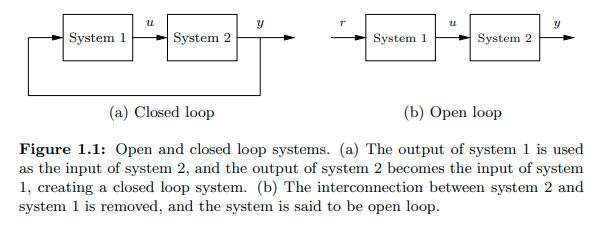
Closed loop system은 Feedback, Open loop system은 Feedforward
1.2 What is Feedforward?

피드백 제어기에서는 C에서 오차를 이용해 입력을 조정, 외란은 측정X, 피드포워드 제어에서는 입력과 외란을 모두 측정해서, 제어 입력을 계산함.
1.2.1 피드백(Feedback) 제어
- 반응형(Reactive) 시스템:
- 피드백은 시스템에서 오류(Error)가 발생한 후에야 수정이 이루어지는 방식
- 즉, 시스템의 출력(Output)을 측정하여 목표 값(Reference Signal)과 비교하고, 차이가 발생하면 이를 보정하는 신호를 생성하여 시스템을 조정합니다.
- 제어 방식:
- 피드백 시스템은 오차(Error)가 발생한 후에 보정이 이루어지는 구조이므로, 항상 뒤늦게 조정이 이루어지는 특징
1.2.2 피드포워드(Feedforward) 제어
- 예측형(Proactive) 시스템:
- 피드포워드는 시스템에 외란(Disturbance)이 영향을 미치기 전에 이를 사전에 감지하고 보정하는 방식
- 즉, 외란을 미리 측정하고, 이에 대한 보정 신호를 생성하여 시스템의 출력을 원하는 값에 가깝게 유지 가능
- 장점과 한계:
- 피드포워드는 명령 신호(Command Signal)에 대한 응답을 조정하는 데 유용
- 하지만, 피드포워드는 외란을 정확히 보상하기 위해 정확한 프로세스 모델(Process Model)이 필요하며, 모델이 부정확하면 보정이 올바르게 수행되지 않을 가능성 존재

1.3 What is Control?
Definition of Control: 시스템에서 알고리즘과 피드백을 사용하는 것
1.4 Feedback Properties
피드백의 원리는 간단하다: 실제 결과와 원하는 결과 사이의 차이를 이용해 수정하는 것

시스템의 Compute block을 통해, 차량의 속도가 측정되고 원하는 속도와 비교함. 원하는 속도와 실제 속도의 차이를 통해서 Throttle을 이용하여 차량의 여러 장치에 의해 가하는 힘이 변경됨.
우측 사진을 보면, 차량의 무게에 따라서 속도가 감소되었다가 원하는 속도로 다시 증강하는 것을 확인할 수 있음. Feedback 시스템을 사용하면, 도로의 경사나 차량의 질량에 상관없이 Reference에 도달할 수 있다.
Robustness to Uncertainty
피드백의 중요한 키 중에 하나는 불확실성에 대한 강건성을 제공하는 것이다.
예를 들어서, 측정된 센서값과 Reference 값간의 차이를 이용하여 보정동작을 수행해서, 외란의 영향을 부분적으로 상쇄할 수 있음.
Challenges of Feedback
피드백제어에 많은 이점이 있지만 잠재적인 약점도 존재함. 시스템이 적절이 설계되지 않는다면 불안정성에 대한 가능성이 있음.
게다가 feeback이 잠재적으로 시스템의 다른 부분들에 영향을 끼칠 수 있음.
1.5 Simple Forms of Feedback
Feedback의 형태는 실제값과 원하는 값의 차이에 기본을 두고 정확한 액션을 만들고자하는데에서 시작
어쨋던 다양한 형태가 있는데 On-Off Control, Proportional Control, PID Control, ..etc가 있음.
On-Off Control
error e = r-y에서, reference signal r and output of the system y, and u는 actuation command(제어 입력)

에러가 0보다 크면, u_max를 입력으로, 0보다 작으면 u_min을 입력으로 설정함.
분명한 문제가 발생
On-Off Control의 경우에는 출력변수가 Max,Min 만 가지기 때문에, 작은 오차 변화에도 급격한 반응을 발생함.
즉, 제어 입력이 연속적으로 조정되지 않고, 오차가 특정 임계값을 넘으면 갑자기 최대 출력을 적용하는 방식이므로, 과도한 반응(Overreaction)이 발생할 수 있습니다.
결과적으로 제어 변수(Controlled Variable)가 지속적으로 진동(Oscillation)하는 현상이 발생합니다.
예제: 온도 조절기(Heating System)
목표 온도: 22°C
현재 온도: 21.9°C → 난방이 OFF
현재 온도: 22.1°C → 난방이 ON
이런 방식으로 ON/OFF가 반복되면서, 온도가 일정 범위에서 계속 진동함.